Sequential Bayes: Utilizing the Posterior Distribution
Source:vignettes/seq_bayes_post.Rmd
seq_bayes_post.RmdIn the Sequential Bayes method, the probability distribution of R0 is
updated sequentially from one case count to the next, starting from a
(discretized) uniform prior. By default, the function
seq_bayes() returns the mean of the last updated posterior
distribution as its estimate of R0. However, by setting the parameter
post to TRUE, it is possible to return the
final distribution itself:
# Daily case counts.
cases <- c(1, 4, 10, 5, 3, 4, 19, 3, 3, 14, 4)
posterior <- seq_bayes(cases, mu = 8, kappa = 7, post = TRUE)First, the distribution can be used to retrieve the original estimate
(had post been left to its default value of
FALSE) by calculating its mean:
# `supp` is the support of the distribution, and `pmf` is its probability mass
# function.
post_mean <- sum(posterior$supp * posterior$pmf)
post_mean
#> [1] 1.476652
# Verify that the following is true:
post_mean == seq_bayes(cases, mu = 8, kappa = 7)
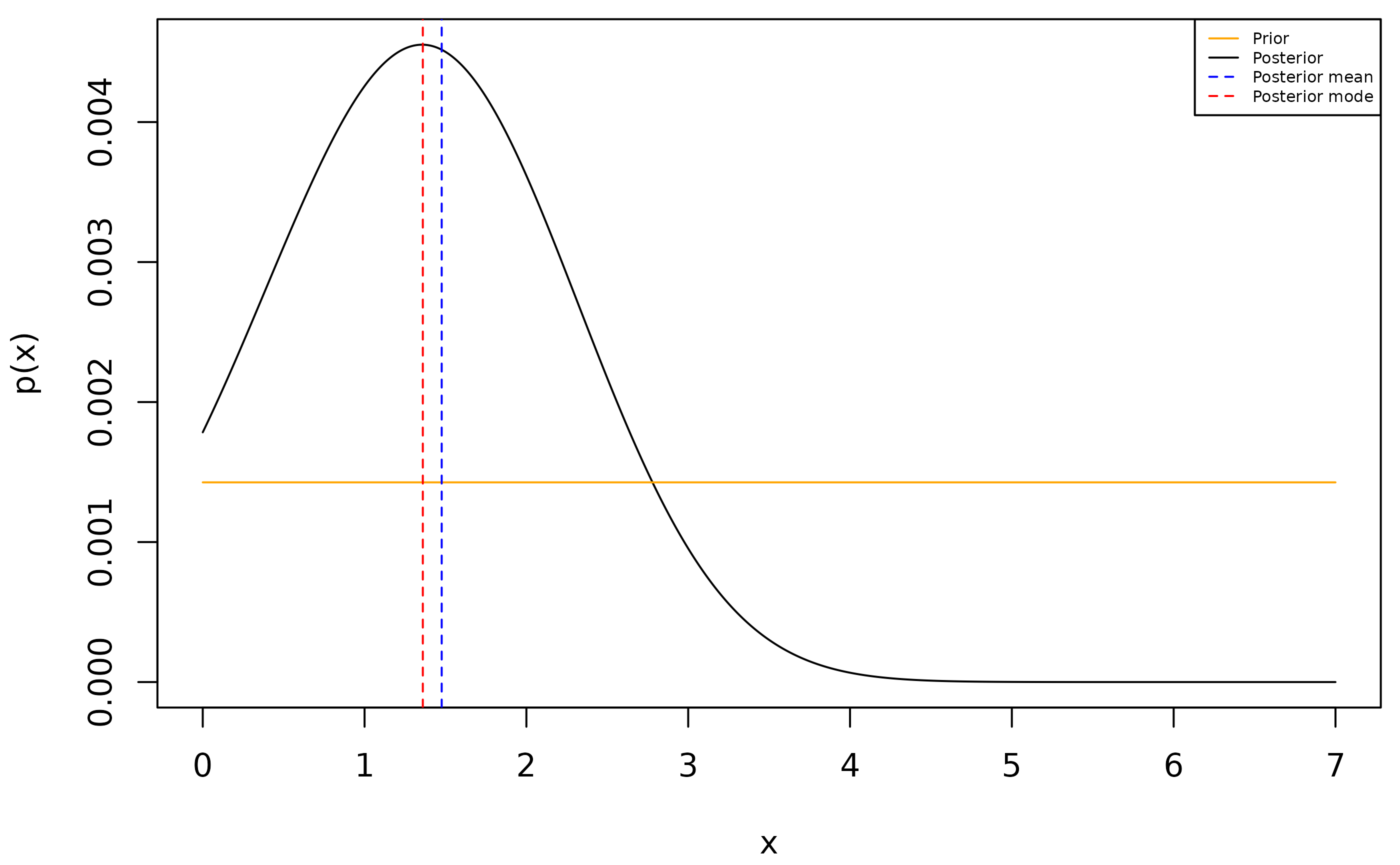
#> [1] TRUEAnother use of the posterior is to obtain an alternative estimate of R0. For instance, the following extracts the posterior mode rather than the mean:
post_mode <- posterior$supp[which.max(posterior$pmf)]
post_mode
#> [1] 1.36Returning the posterior is suitable for visualization purposes. Below is a graph containing the uniform prior, final posterior distribution, posterior mean and posterior mode: